Efficient Depth Estimation Using RAFT-Stereo and NEUFlow-V2
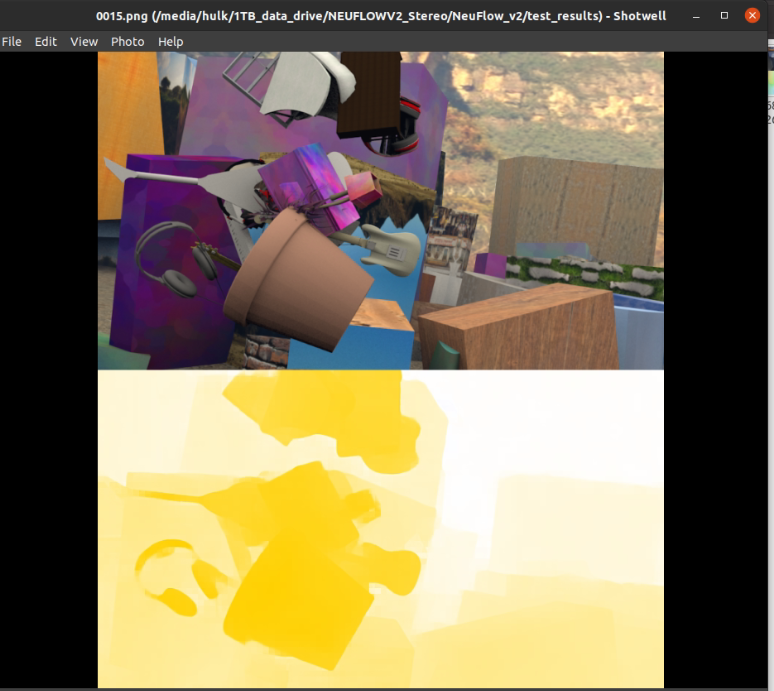
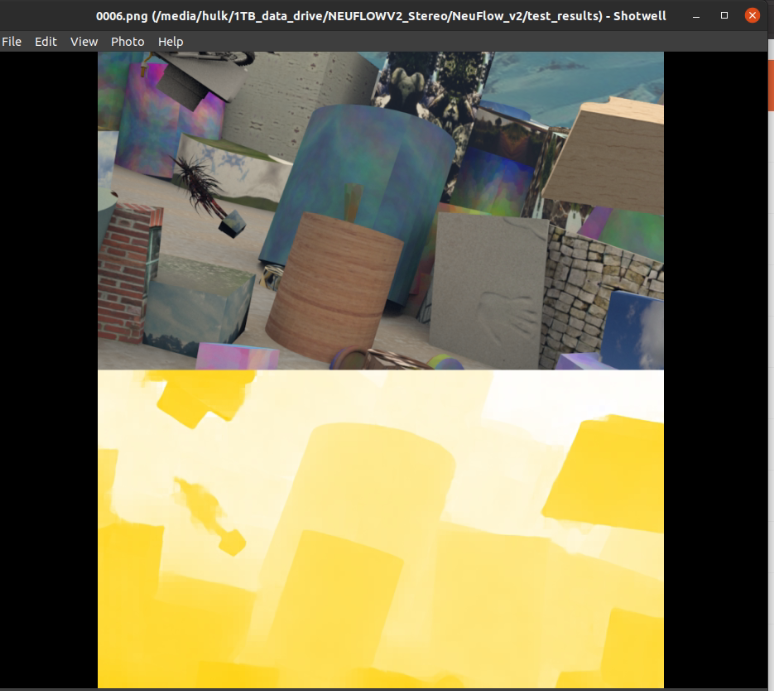
• Generated depth maps from rectified stereo setups by integrating disparity-based estimation into
the NEUFlow-V2 framework, optimizing computational efficiency on edge devices.
• Combined the correlation pyramid framework from RAFT-Stereo with the frame rate efficiency of
NEUFlow-V2 to enhance real-time processing capabilities.
• Achieving an End-Point Error (EPE) of 3.8 on the FlyingThings dataset as initial results,
demonstrating accurate and efficient disparity-based depth estimation.